No probably no diff cos with 1.8° steppers, 400 is 1/2 stepping, 800 is 1/4 stepping, but u will see diff say at full tilt, 1/16th steps vs 1/2. (Should also see a torque diff between full steps & 1/8th stepping rate too).I said in my earlier posting that 800 steps per rev was as low as my microstepper could go, but that is wrong. The setting in the table that's labeled "default" is 400 steps per rev. I said in an even earlier post that I would soon have a 12T pulley and be able to go to a 10:1 ratio. That was wrong, too. I misread the product description, which is for an HTD5M pulley, not the HTD3M that I'm using. With the 8:1 ratio I have on the machine, at 400 steps per rev, without changing my code, I'm feeding 25% too fast (25,600 steps per inch vs 32,000) already, so there will be no problem with the step rate that I can generate. I don't see any difference in the static torque test at 400 steps per rev vs 800.

-
Welcome back Guest! Did you know you can mentor other members here at H-M? If not, please check out our Relaunch of Hobby Machinist Mentoring Program!
You are using an out of date browser. It may not display this or other websites correctly.
You should upgrade or use an alternative browser.
You should upgrade or use an alternative browser.
electronic lead screw
- Thread starter greenail
- Start date
Clearly my perspective is wrong then, I am thinking here if wear forces on the brass (mine) 1/2 nuts & on smallish HSS threading tool that has to put up with lateral carriage forces and the rotational force of stock being cut/threaded. Wonder what that would be for 2'' dia, CS1020 steel, 20 thou cut for 8 tpi?!I haven't worked through the section in Machinery's Handbook on Estimating Machining Power yet, but 590 pounds of force is way down on the scale in this world. Consider that a Grade 8 bolt has a typical tensile strength of 150,000psi. I remember Tom Lipton (oxtools) mentioning the amount of clamping force provided by a #10 screw in his Mini Pallet project a couple of years ago and being surprised. A noob like me isn't used to thinking in those terms.
pics clipped.Pleased with my progress today. Enclosure for the electrics / electronics sorted.
Circular connectors for all the connections to the outside world. Smaller 6 pins will be for display, spindle encoder and servo encoder. The larger 4 pin will be for servo power.
Now I need to wire it all up, and fit a fan on the front cover to ensure a constant flow of air
Hiya Great Old One, yes you are! doing quite nicely, i greening up here too.
Procrastination hasn't bitten you!
Um, a Q that i cant seem to find answers for On clough42's site:
Is there any chance you could list the characteristics, features of his design..
I don't mean a list of all thread choices,
they maybe in one of his vid's but . Or maybe U can point me in the right direction.
cheers,
- Joined
- Mar 20, 2014
- Messages
- 416
pics clipped.
Hiya Great Old One, yes you are! doing quite nicely, i greening up here too.
Procrastination hasn't bitten you!
Um, a Q that i cant seem to find answers for On clough42's site:
Is there any chance you could list the characteristics, features of his design..
I don't mean a list of all thread choices,
they maybe in one of his vid's but . Or maybe U can point me in the right direction.
cheers,
As far as I know it has the following capabilities:
- spindle rpm readout
- ability to switch between metric & imperial units
- foward and reverse the leadscrew independent of the rotational direction of the spindle
- feed in a number of different increments (mm or inch) per spindle rev
- set a variety of TPI threads
- set a variety of mm threads.
This is all from my recollection of features seen in the vids, and probably isn’t exhaustive... he’s also canvesing for additional features to be added on the github page.
GitHub - clough42/electronic-leadscrew: Lathe electronic leadscrew controller
Lathe electronic leadscrew controller. Contribute to clough42/electronic-leadscrew development by creating an account on GitHub.
 github.com
github.com
Home
Lathe electronic leadscrew controller. Contribute to clough42/electronic-leadscrew development by creating an account on GitHub.
github.com
Thanks Greatoldone, & thankyou for the links.
I do hope he adds some of the functionality of Wade'O design's amazing machine, unfortunately no MCU files posted, & no responses from him. Sad indeed. something must have happened. His is a bit like Rocketronics.de,
with auto in-feeding, cycled down to the final finishing cut.. & much more.
I do hope he adds some of the functionality of Wade'O design's amazing machine, unfortunately no MCU files posted, & no responses from him. Sad indeed. something must have happened. His is a bit like Rocketronics.de,
with auto in-feeding, cycled down to the final finishing cut.. & much more.
Gents - there is a SUPER ELS ready-to-go from RockeTronics in Germany. ELS4 has just been released and will do EVERYTHING you ever dreamed of with an ELS... and more! I have the earlier version, the ELS3. I have installed it on a LMS-3536 (Sieg SC-4) lathe. I will be putting up some pix of the install.
But before you go to all the work of “reinventing this wheel” - take a look at the RockeTronics ELS4. It is plenty of work to just get your lathe “motored-up” let alone design issues of trying to create your own.
Full Disclosure: I am NOT a rep of RockeTronics- just a very satisfied user.
=A.
But before you go to all the work of “reinventing this wheel” - take a look at the RockeTronics ELS4. It is plenty of work to just get your lathe “motored-up” let alone design issues of trying to create your own.
Full Disclosure: I am NOT a rep of RockeTronics- just a very satisfied user.
=A.
- Joined
- Jan 5, 2014
- Messages
- 1,005
The ELS4 looks like a very fine product and reasonably priced too for what it does. For me, the fun is as much the journey as the destination. The ELS4 would get me there faster but I would miss all the planning, debugging, hair pulling, parts throwing, starting over, swearing and learning I get to experience by rolling my own.
Some of the ELS4 documentation shows the Z stepper attached directly to the lead-screw and not through a gearbox. I suppose that could have some benefits of less backlash. Any opinions on that? I had planned on putting my motor on the other side of the gearbox but I can see some advantages of not doing it that way.
Some of the ELS4 documentation shows the Z stepper attached directly to the lead-screw and not through a gearbox. I suppose that could have some benefits of less backlash. Any opinions on that? I had planned on putting my motor on the other side of the gearbox but I can see some advantages of not doing it that way.
Well - good luck on the planning/debugging! I've been doing tech & software for 40 years, and had my first "inspiration" in 1984 for what I called an "Electronic Gear Box". I had a Sheldon 10" lathe at the time, and the world of tech had not advanced enough to make building such a control within my reach. In 2013 I began dinking with the Arduino family and was hot in pursuit of my EGB dream. Turns out the math of replacing the gear reduction from the spindle-to-leadscrew to get the needed thread turning ration was a BUGGER! Perhaps you are more math-inclined... But you won't be "making chips" any time soon! I highly encourage you to d/l the ELS4 manual (English too!) and go over all that it does. At the least this would give you a bit of a road-map as to what you will need to do.
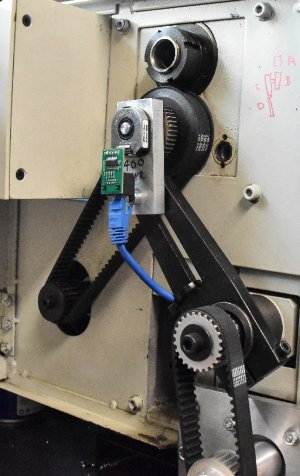
Louis (maker of ELS4) has a lot of info on his site about NOT using ratios from stepper to leadscrew. I will enclose 3 images of my leadscrew hookup. I did NOT want the usual thing where the motor sticks out way to the left... I'll put the whole pix series up shortly, but these will give you an idea. I modded the lathe as little as possible - but did need to chop up the gearbox cover for the motor to fit... mostly a cosmetic change. That is a 400 PPI encoder (recommended by Louis) and I tried to tie it all into the existing gearbox setup. Overall - it seems to work VERY well - but running a lathe this way is a HUGE paradigm shift you are skilled/experienced at manually "running the dials" to do your cuts.
More later...
=A.
Louis (maker of ELS4) has a lot of info on his site about NOT using ratios from stepper to leadscrew. I will enclose 3 images of my leadscrew hookup. I did NOT want the usual thing where the motor sticks out way to the left... I'll put the whole pix series up shortly, but these will give you an idea. I modded the lathe as little as possible - but did need to chop up the gearbox cover for the motor to fit... mostly a cosmetic change. That is a 400 PPI encoder (recommended by Louis) and I tried to tie it all into the existing gearbox setup. Overall - it seems to work VERY well - but running a lathe this way is a HUGE paradigm shift you are skilled/experienced at manually "running the dials" to do your cuts.
More later...
=A.
Attachments


- Joined
- Jan 5, 2014
- Messages
- 1,005
Roughly the same background for me. I have done quite a bit of embedded firmware and am comfortable with the math. I have been in the "thinking about it" stage for a couple of years now. I did download the ELS4 manual and will read it in the next day or two. Thanks for the pictures!Well - good luck on the planning/debugging! I've been doing tech & software for 40 years, and had my first "inspiration" in 1984 for what I called an "Electronic Gear Box". I had a Sheldon 10" lathe at the time, and the world of tech had not advanced enough to make building such a control within my reach. In 2013 I began dinking with the Arduino family and was hot in pursuit of my EGB dream. Turns out the math of replacing the gear reduction from the spindle-to-leadscrew to get the needed thread turning ration was a BUGGER! Perhaps you are more math-inclined... But you won't be "making chips" any time soon! I highly encourage you to d/l the ELS4 manual (English too!) and go over all that it does. At the least this would give you a bit of a road-map as to what you will need to do.
Louis (maker of ELS4) has a lot of info on his site about NOT using ratios from stepper to leadscrew. I will enclose 3 images of my leadscrew hookup. I did NOT want the usual thing where the motor sticks out way to the left... I'll put the whole pix series up shortly, but these will give you an idea. I modded the lathe as little as possible - but did need to chop up the gearbox cover for the motor to fit... mostly a cosmetic change. That is a 400 PPI encoder (recommended by Louis) and I tried to tie it all into the existing gearbox setup. Overall - it seems to work VERY well - but running a lathe this way is a HUGE paradigm shift you are skilled/experienced at manually "running the dials" to do your cuts.
More later...
=A.
- Joined
- Mar 20, 2014
- Messages
- 416
Baby steps, but it‘s alive!
Similar threads
- Replies
- 4
- Views
- 383
- Replies
- 12
- Views
- 417
- Replies
- 4
- Views
- 290
- Replies
- 6
- Views
- 801