- Joined
- May 12, 2014
- Messages
- 5
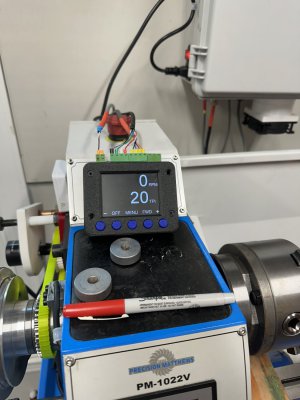
Just added the 1-axis ELS controller from electronicleadscrew.eu. Installation couldn't be simpler. I had posted a couple of questions last month about the Clough42 ELS, which I had been working on, about flashing the TI Launchpad card. I never had success with it, even with two cards. Since I am not a programmer or software engineer, the problems are likely self-inflicted.
However, the French system is very easy to install and get operational. Even though the videos, website and instructions are very spartan, the system is plug and play. There are two test functions, an angular test, to ensure accuracy of the optical encoder, and a linear test, to test the carriage travel against the input parameters. Very easy to verify.
I used a RATTM motor 3Nm stepper motor and controller from Amazon, a Meanwell 48v power supply, and assorted hardware. I started using avionics plugs but had issues with the stepper controller, so it is now wired directly to the controller. The encoder mount is based on files from my Hobby Machinist brethren, but modified slightly. I made the encoder belt from TPU on my 3D printer.
Since the lathe spindle gear is 40t, the encoder is too. Both are HTD 5m profile, as are the 15t driver pulley and the 30t lead screw pulley. I got those on eBay.
I have to use the "A" setting on the gearbox for my ratios to work out in the test mode, but I look forward to threading something so I can more accurately test the system. All in all, the system works right out of the box, is inexpensive, intuitive, and quick to set up. I wish I had gone this route initially; I would have saved a lot of time and money.
However, the French system is very easy to install and get operational. Even though the videos, website and instructions are very spartan, the system is plug and play. There are two test functions, an angular test, to ensure accuracy of the optical encoder, and a linear test, to test the carriage travel against the input parameters. Very easy to verify.
I used a RATTM motor 3Nm stepper motor and controller from Amazon, a Meanwell 48v power supply, and assorted hardware. I started using avionics plugs but had issues with the stepper controller, so it is now wired directly to the controller. The encoder mount is based on files from my Hobby Machinist brethren, but modified slightly. I made the encoder belt from TPU on my 3D printer.
Since the lathe spindle gear is 40t, the encoder is too. Both are HTD 5m profile, as are the 15t driver pulley and the 30t lead screw pulley. I got those on eBay.
I have to use the "A" setting on the gearbox for my ratios to work out in the test mode, but I look forward to threading something so I can more accurately test the system. All in all, the system works right out of the box, is inexpensive, intuitive, and quick to set up. I wish I had gone this route initially; I would have saved a lot of time and money.